Introduction
Introduction to the Erebus platform
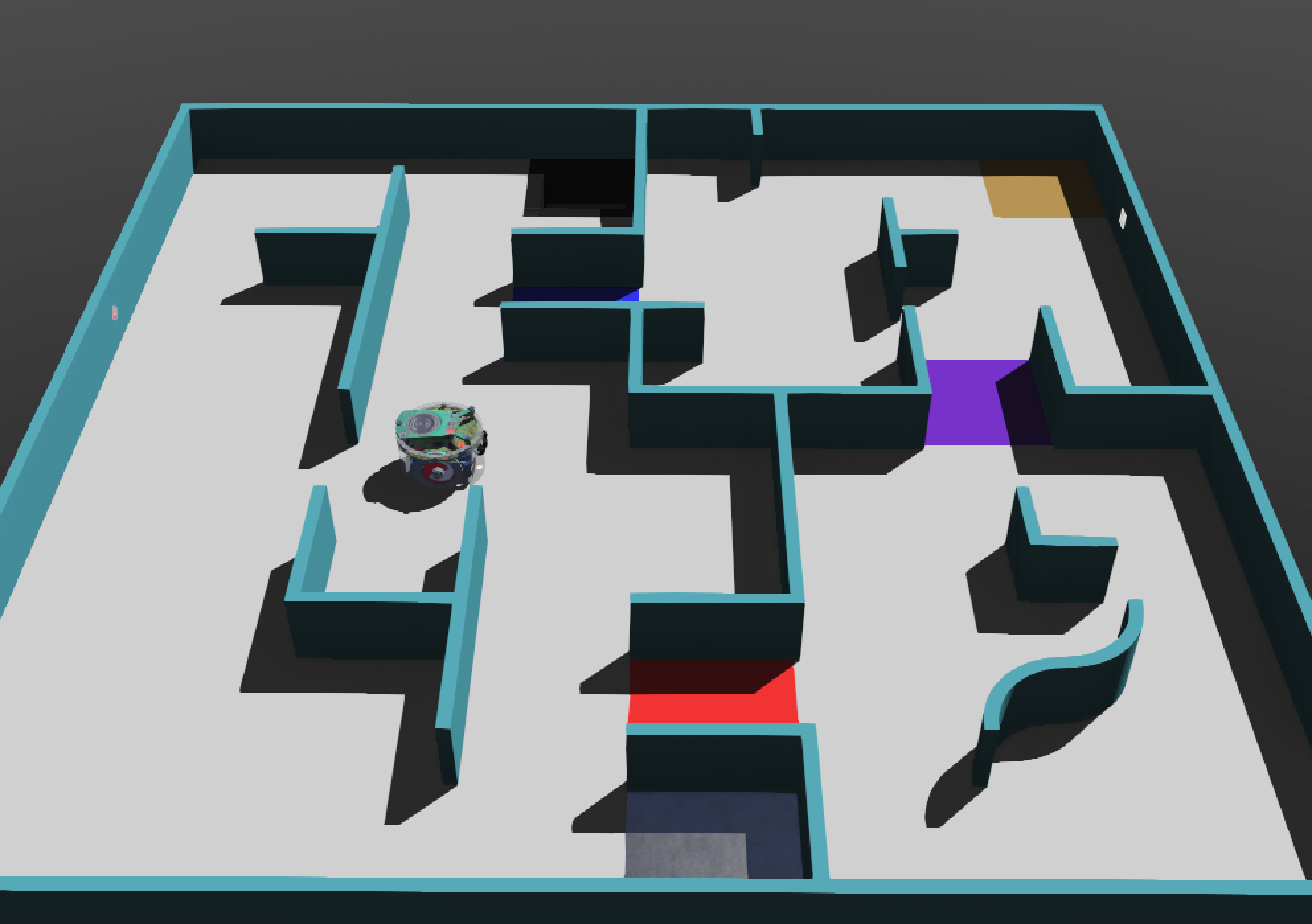
Erebus is a robot simulation competition environment in which you must develop a controller for a robot to explore a maze, use sensing methods to find as many ‘victims’, and map the environment whilst avoid obstacles and traps.
It is built on Webots, a robotic simulation platform designed for a professional use and has been widely used in industry, education and research. Cyberbotics maintains Webots as its main product continuously since 1998. Here is a link to Webots official User Guide. On this site we present documentation as well as tutorials and guides for using the Erebus simulator.
Introduction to the Erebus platform
List of related events
Here is a brief introduction to the rules of the competition.
This section explains how to setup the environment.
Show how to work through some end to end examples and component specific examples
Reference for funtions and parameters
How to contribute to Erebus
Was this page helpful?
Glad to hear it! Please tell us how we can improve.
Sorry to hear that. Please tell us how we can improve.